Generate “low poly” images using Delaunay triangulation
Intro<<
According to sessions.edu a “low poly” image is an image composed from:
Simple geometric shapes placed side-by-side to create angular, often minimalist, compositions.
To give an example, the following image is considered to be “low poly”:

The roots of “low poly” art goes back to the early days of computer graphics, where the lack of performant hardware forced computer scientists and game designers to present their idea using as few polygons as possible. Nowadays, this is not really an issue, but the artistic nature of having more edges than curves is still present, representing a somewhat niche artistic style.

Being fascinated by this style, one might ask how could we generate images like this? More specifically, how could we transform an arbitrary image into a “low poly” one? One solution would be Delaunay triangulation, which will be presented below.
Delaunay triangulation<<
Let’s imagine the following challenge: we are given a set of points in a 2D space. From this set of points we should create a mesh having the following properties: - the mesh should be composed of triangles - no overlapping triangles are allowed - the mesh should be pleasing to the eye: - we should avoid having sliver triangles. - the area of each triangle should be minimal, or at least the tendency should be to prioritize triangles with smaller areas.
One way to tackle this challenge would be to use Delaunay triangulation algorithm. According to Wikipedia, the definition is the following:
In mathematics and computational geometry, a Delaunay triangulation (also known as a Delone triangulation) for a given set P of discrete points in a plane is a triangulation DT(P) such that no point in P is inside the circumcircle of any triangle in DT(P).
Let’s break this down. First, let’s see what is the circumcircle of a triangle? The circumcircle of a triangle is basically a circle that can be drawn around the triangle in such a way that every vertex of the triangle touches the circle itself.
Example:
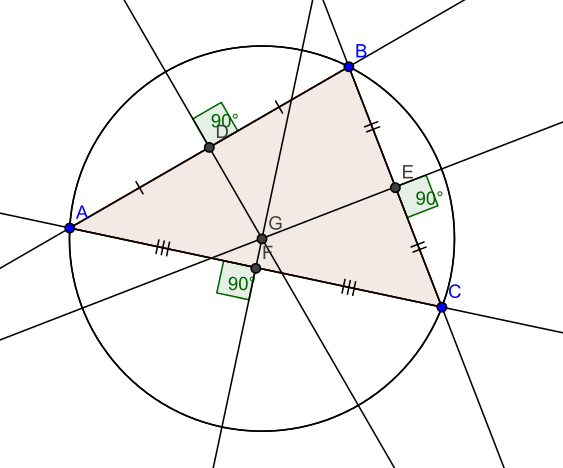
In order to calculate the center (circumcenter) of the circle, we can use the following formulas:
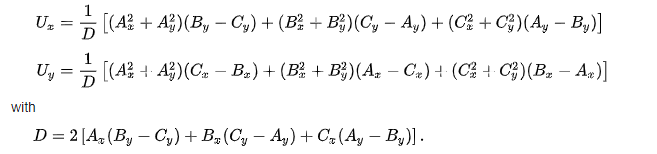
Where U(x, y) represents the center of the circle in cartesian coordinates, and A(x, y), B(x, y) and C(x, y) are the vertices of the triangle.
The radius of the circumcircle can be calculated as follows:

As we see a lot of formulas here, the good thing is that they are pretty straightforward to implement, and relatively easy to unit tests, given the fact that there are a lot of only circumcircle calculators out there. Let’s see some code here:
// https://en.wikipedia.org/wiki/Circumscribed_circle#Triangles
private static Circle calculateCircumCircle(Point a, Point b, Point c) {
double d = 2 * (a.x * (b.y - c.y) + b.x * (c.y - a.y) + c.x * (a.y - b.y));
double centerX = 1.0 / d * ((a.x * a.x + a.y * a.y) * (b.y - c.y) + (b.x * b.x + b.y * b.y) * (c.y - a.y) + (c.x * c.x + c.y * c.y) * (a.y - b.y));
double centerY = 1.0 / d * ((a.x * a.x + a.y * a.y) * (c.x - b.x) + (b.x * b.x + b.y * b.y) * (a.x - c.x) + (c.x * c.x + c.y * c.y) * (b.x - a.x));
Point bSign = new Point(b.x - a.x, b.y - a.y);
Point cSign = new Point(c.x - a.x, c.y - a.y);
double dSign = 2 * (bSign.x * cSign.y - bSign.y * cSign.x);
double centerXSign = 1.0 / dSign * (cSign.y * (bSign.x * bSign.x + bSign.y * bSign.y) - bSign.y * (cSign.x * cSign.x + cSign.y * cSign.y));
double centerYSign = 1.0 / dSign * (bSign.x * (cSign.x * cSign.x + cSign.y * cSign.y) - cSign.x * (bSign.x * bSign.x + bSign.y * bSign.y));
double r = Math.sqrt(centerXSign * centerXSign + centerYSign * centerYSign);
return new Circle(new Point(centerX, centerY), r);
}
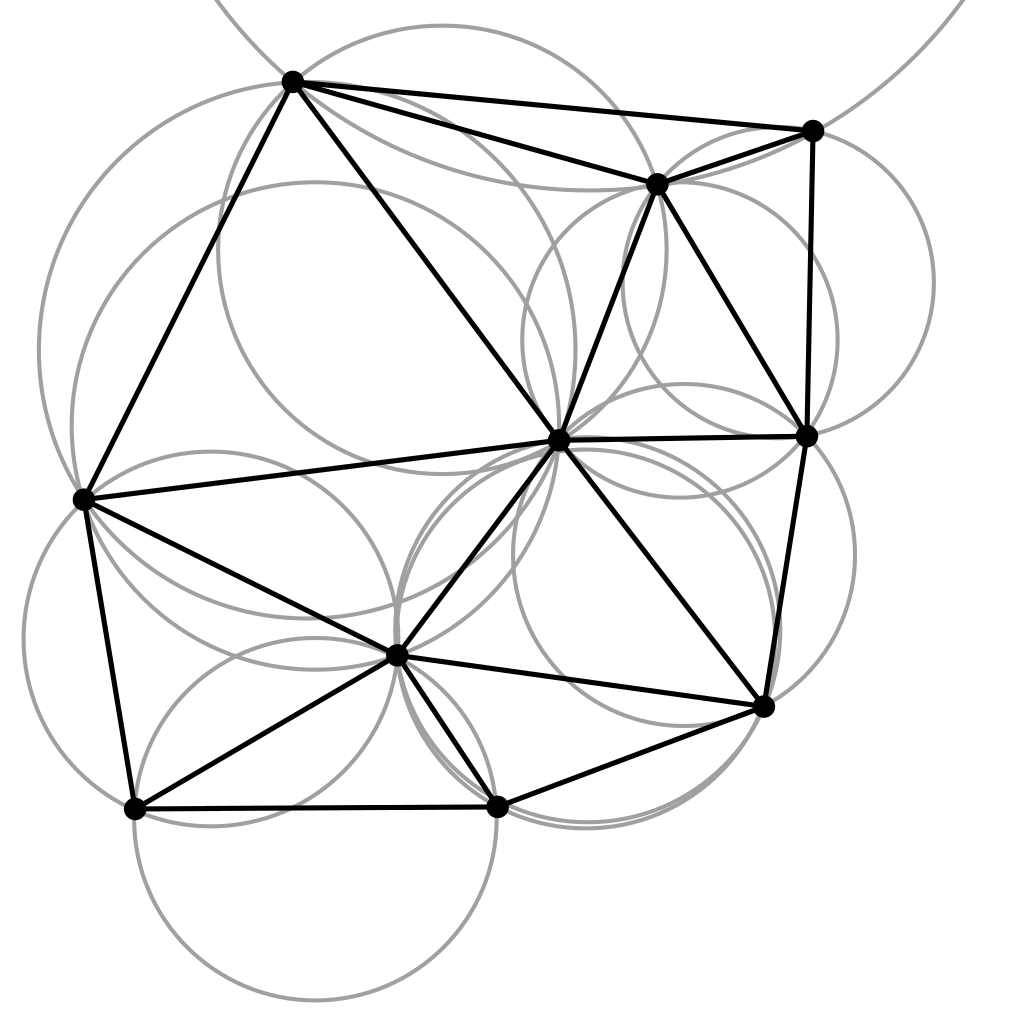
Now that we know what a circumcircle is, let’s reformulate the initial definition. The definition states that we have a set of points in a 2D space and we incorporate them into triangles in such a way that no triangle has a vertex that is inside of another triangle’s circumcircle. The vertex can and should be on a circumcircle, but should not be inside in another triangle’s circumcircle:
Moving forward there are several categories of algorithms used for Delaunay triangulation. Probably to be the easier to understand and implement is the one called Bowyer-Watson algorithm. This algorithm is an incremental algorithm, meaning that we try to add each point one by one to the final result. If one point will not suffice the Delaunay triangulation definition, we try to re-triangulate all the affected areas of the final result. The steps of the algorithm are the following:
function BowyerWatson (pointList)
// pointList is a set of coordinates defining the points to be triangulated
triangulationResult := empty triangle mesh data structure
// create a super triangle which contains all the points
add super-triangle to triangulation
// iterate through each point
for each point in pointList do
badTriangles := empty set
// filter all the triangles which circumcirlce contains the current point
for each triangle in triangulationResult do
if point is inside circumcircle of triangle
add triangle to badTriangles
polygon := empty set
// get all the edges from bad triangles which are not shared by other bad triangles. Add them to another set.
for each triangle in badTriangles do
for each edge in triangle do
if edge is not shared by any other triangles in badTriangles
add edge to polygon
// remove all the bad triangles from the final result
for each triangle in badTriangles do
remove triangle from triangulationResult
// use each edges which are not shared to create new triangles using the current point from the pointlist
for each edge in polygon do
newTriangle := form a triangle from edge to point
add newTriangle to triangulationResult
// remove the original super triangle
for each triangle in triangulationResult
if triangle contains a vertex from original super-triangle
remove triangle from triangulationResult
return triangulationResult
Java implementation:
// https://en.wikipedia.org/wiki/Bowyer%E2%80%93Watson_algorithm
private List<Triangle> bowyerWatson(List<Point> edgePoints, Size imageSize) {
List<Triangle> triangles = new ArrayList<>(createInitialSuperTriangle(imageSize));
for (Point point : edgePoints) {
Map<Boolean, List<Triangle>> partitionedTriangles = triangles.stream()
.collect(Collectors.partitioningBy(triangle -> triangle.getCircumCircle().isInside(point),
Collectors.toCollection(ArrayList<Triangle>::new)));
List<Triangle> badTriangles = partitionedTriangles.get(true);
Set<Edge> polygon = new HashSet<>();
for (Triangle triangle : badTriangles) {
for (Edge edge : triangle.getEdges()) {
boolean sharedEdge = false;
for (Triangle otherTriangle : badTriangles) {
if (triangle != otherTriangle && otherTriangle.containsEdge(edge)) {
sharedEdge = true;
break;
}
}
if (!sharedEdge) {
polygon.add(edge);
}
}
}
List<Triangle> goodTriangles = partitionedTriangles.get(false);
for (Edge edge : polygon) {
goodTriangles.add(new Triangle(edge.getA(), edge.getB(), point));
}
triangles = goodTriangles;
}
if (arguments.isDeleteBorder()) {
List<Triangle> superTriangle = createInitialSuperTriangle(imageSize);
return triangles.stream().filter(triangle -> {
for (Triangle st : superTriangle) {
for (Edge edge : triangle.getEdges()) {
if (st.containsVertex(edge.getA()) || st.containsVertex(edge.getB())) {
return false;
}
}
}
return true;
}).collect(Collectors.toList());
}
return triangles;
}
The algorithm has an O(n^2) time complexity, which leaves some room for improvement, but it has potential for parallelization.
Putting it all together<<
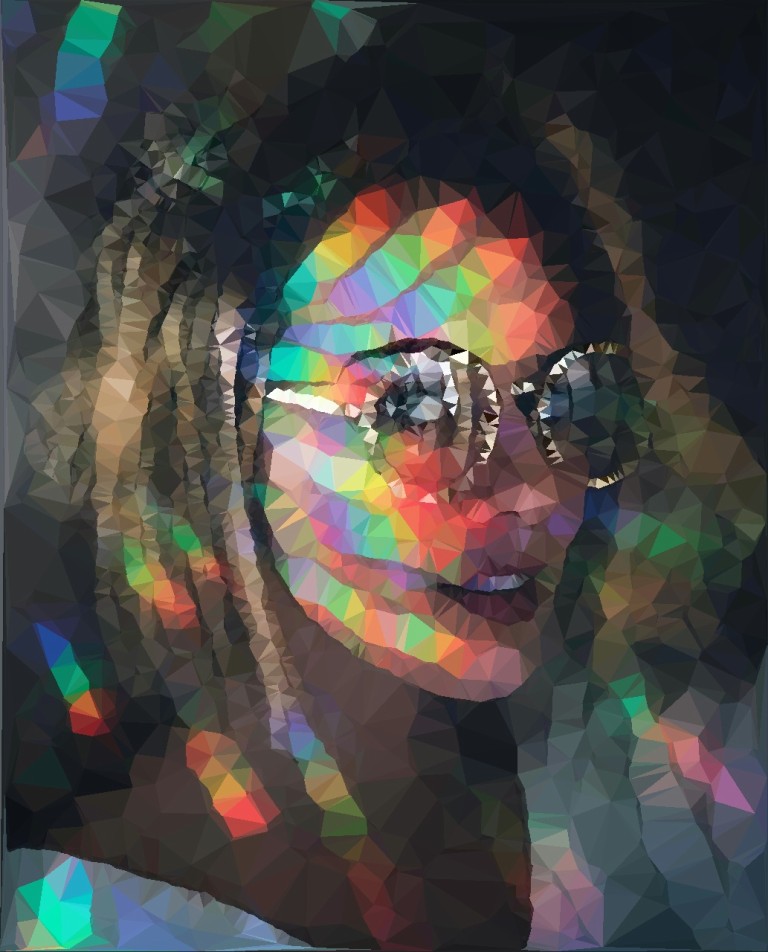
Knowing how the Delaunay triangulation works, the next challenge would be to apply it somehow to get from this image:

to this one:
To achieve this, we could consider the following steps:
- Apply a blurring filter to the image.
- Create a gray-scale image from the blurred image.
- Apply some edge detection to the image and capture the output.
- Clean up the image by applying a simple de-noising (thresholding) algorithm.
- Feed the output to the Delaunay triangulation algorithm to get a set of triangles forming the Delaunay mesh.
- Reconstruct the image from the mesh.
Moving forward, let’s break these steps down by having an in-depth discussion about some implementation details. Every step involves some kind of image manipulation algorithm. Although it would be fun to manually implement all of them, in this case, I’ve decided to use a third-party library, namely openpnp/opencv, which is a Java wrapper around the already established OpenCV image processing library.
-
Apply a blurring filter to the image:
A common way to blur images is by applying a Gaussian filter to the image. A Gaussian filter is basically an NxN matrix that gets convolved with the RGB pixel values of the image. Using OpenCV, this can be done by a simple function call:
Imgproc.GaussianBlur(originalImage, blurredImage, new Size(arguments.getBlurKernelSize(), arguments.getBlurKernelSize()), 0);
The size of the kernel aka filter determines how “blurry” the image will be. To not lose a lot of information regarding the characteristics of an image, I recommend sticking to smaller kernel sizes. This is important since it will have a significant impact on the final result.
Besides Gaussian blur approach, there are other solutions for getting a blurry image, (example. Stack-blur). Usually, the tendency is faster blurring procedures will result in a lower quality blur, but in our case, this does not really affect the final result. I simply went with the Gaussian algorithm, because OpenCV provides an implementation for it.
-
Create a gray-scale image from the blurred image:
Probably everyone knows what a grayscale image is. Essentially is a black-and-white image or a monochrome image carrying only light intensity information. Usually, if we want to transform an RGB image into a grayscale one, we can compute the value of each pixel using a weighted sum. The formula can be found on the Wikipedia - Grayscale page. Using OpenCV, grayscaling can be achieved with the following line:
Imgproc.cvtColor(blurredImage, grayscaleImage, Imgproc.COLOR_RGB2GRAY);
-
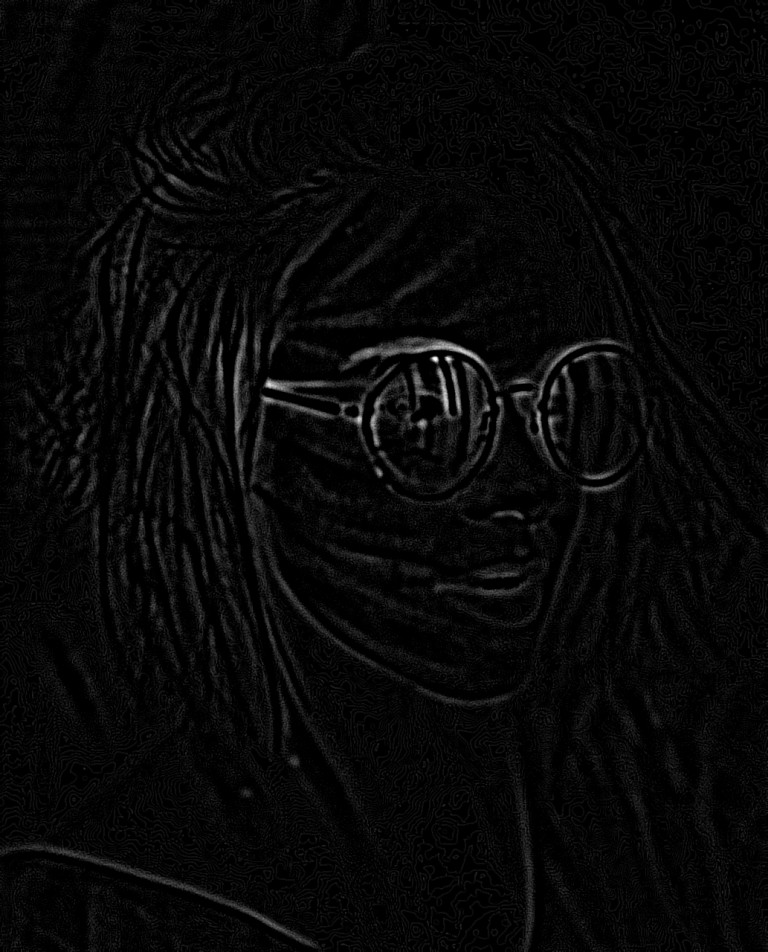
Apply some edge detection to the image and capture the output
Next, we would want to isolate the main characteristics of an image by doing edge detection. Again, there are several methodologies to detect the edges from an image. For our case, a simple Sobel operator might be sufficient to get an acceptable result.
-
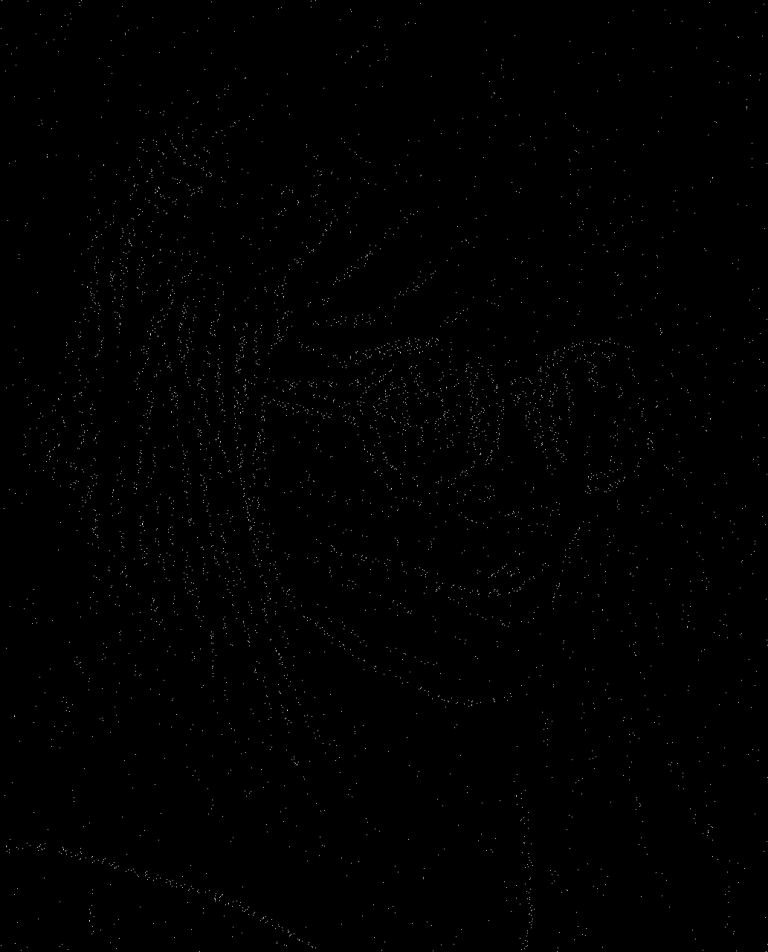
Clean up the image by applying a simple de-noising algorithm
To get rid of noise and to also preserve the strongest edges from the image, we would want to apply some thresholding to it, eventually creating a binary image. The simplest thresholding approach works just fine, meaning that we get an input threshold value and we compare that with every pixel from the image with the edges. If the pixel value is greater than the threshold value, we set the pixel to be 255 - white. Every pixel with a value less than the threshold will be 0 - black.
We can play around with the value of the threshold because it will impact the outcome significantly. A lower threshold may result in images having way more information preserved than higher threshold values. Depending on what we want to achieve, this may result in favorable output or it may have too much going on.
-
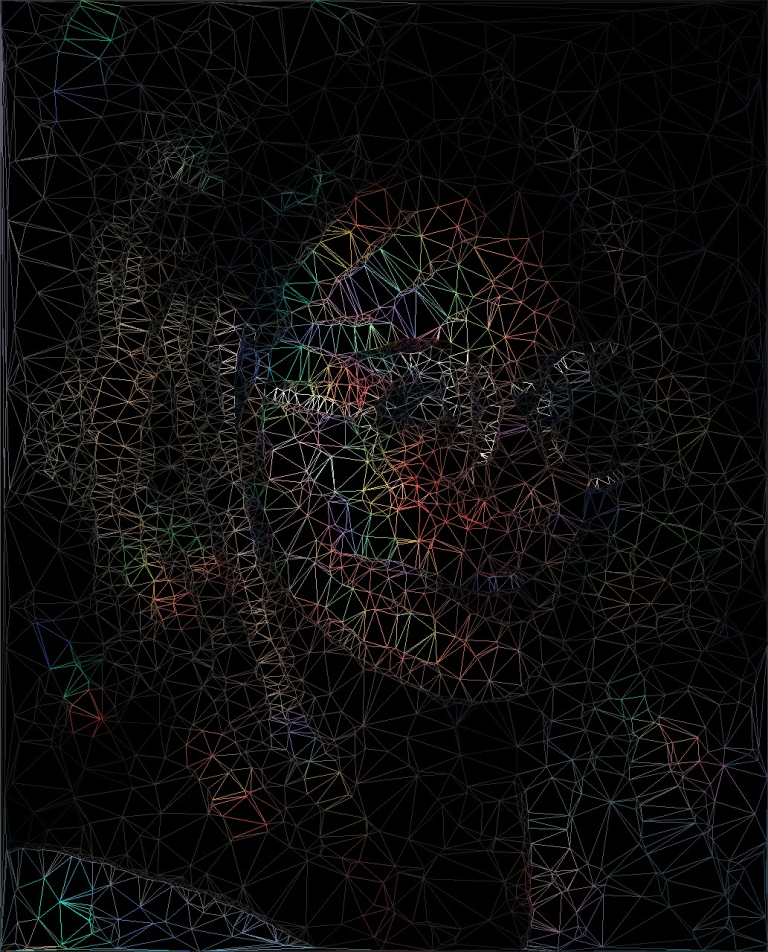
Feed the output to the Delaunay triangulation algorithm to get a set of triangles forming the Delaunay mesh
After thresholding, we may end up with a bunch of black and white pixels. If we feed the location of these pixels to the Delaunay algorithm, we get a mesh of triangles that can be plotted to a surface. If we are lucky, the triangles will be aligned in a way that preserves the essence of the original image.
-
Reconstruct the image from the mesh
To fill these triangles with colors, we can take each node from a triangle and locate the original pixels for their locations. Adding the RGB values of the original pixels and dividing the sum by 3, we may get an RGB value which may be used to fill the triangle.
The final result may look like this:
The code for this project can be found on Github
Parameters used to generate the final image:
java -jar delaunay.jar res/img3.jpg res/out.jpg -ea laplacian -bk 25 -sk 5 -max 4600 -t 150
References:<<
- Delaunay triangulation: Wikipedia page
- Circumcircle of a triangle: Wikipedia page
- Bowyer-Watson algorithm: Wikipedia page
- Gaussian blur: Wikipedia page
- Grayscale image: Wikipedia page
- Sobel operator: Wikipedia page
- Thresholding: Wikipedia page